Technology
An Optically linked Hybrid Autonomous/Remotely Operated Vehicle constitutes an innovation, addressed to cover the gap between the cabled Resident HROV concept and the fully autonomous I-AUV. Its application is twofold: it enables remote inspection/intervention at short range and it provides the hardware infrastructure required for a smooth transition to the full I-AUV concept.
Remote Inspection/Intervention Concept
The demonstration will be performed using a GIRONA 1000 I-AUV equipped with an INS-DVL/USBL navigation system, a patent-pending real-time laser scanner, a 6 DOF Reach Bravo arm and a hydromea LumaX 10 Mbps optical modem mounted on a pan & tilt unit. A communication tripode (developed in the project) equipped with an USBL transceiver, a LumaX optical modem, and a cabled surface buoy with a Wifi access point, will be used to replace the docking station. Two experiments will be performed:
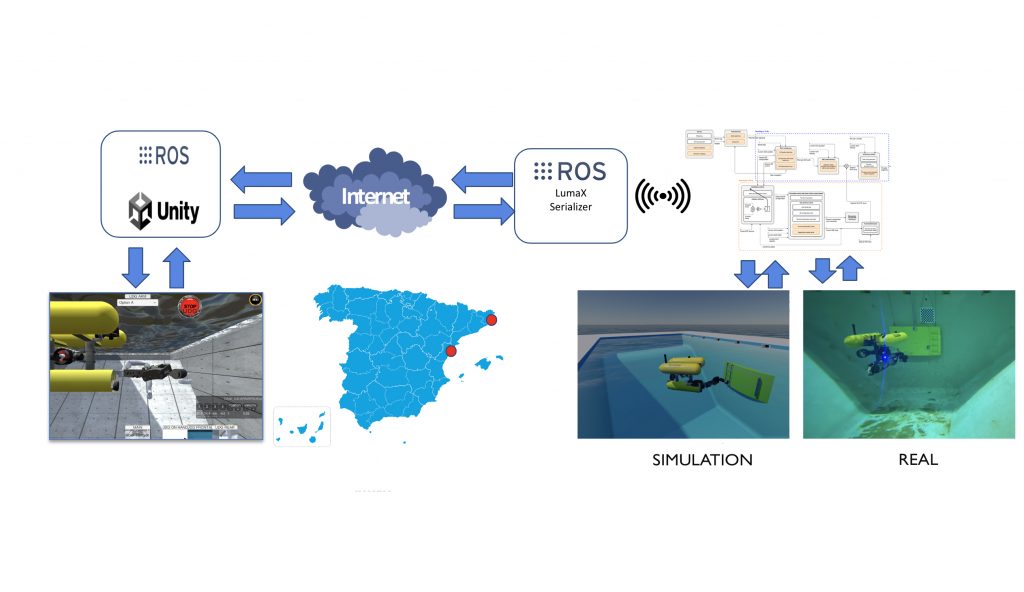
- In Lab Technology Validation (TRL 4): The experiment will take place at CIRS test tank (Girona), where an industrial-like pipe structure will be placed. The robot will be Remotely Operated from CIRTESU (Castellón) using the HRI system upgraded along this project.
- Validation/Demonstration in a Relevant Environment (TRL 5-6): Next the Robot, the tripode and the structure will be moved to a site in the Girona Coast (in the area of Sant Feliu de Guíxols), taking advantage of the UdG’s Sextant Boat. The Wifi buoy will be connected to the boat and from there to the Internet using a 4G connection. Teleoperation will happen again from CIRTESU (Castellón).
Proposed Proof of Concept Demonstration